
 HIGH INTELLIGENCE Mining Operating System
HIGH INTELLIGENCE Mining Operating System
Adaptation for full models, multiple minerals, and full scenarios
 HIGH-QUALITY Standard Delivery Process
HIGH-QUALITY Standard Delivery Process
Software Hardwareization, Service Productization, Systems platform-ization
 HIGH-PERFORMANCE Smart Mining System
HIGH-PERFORMANCE Smart Mining System
Safety, Efficiency, Automation, Fleet, Sustainablity


 High Precision Mapping
High Precision Mapping
 Global Path Planning
Global Path Planning
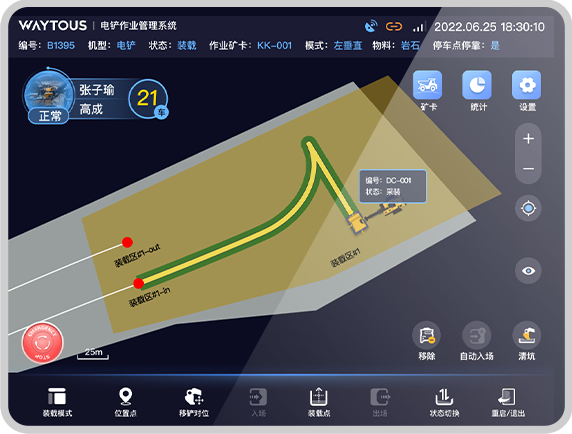
 Intelligent Scheduling
Intelligent Scheduling
 Collaboration with Manned Vehicles
Collaboration with Manned Vehicles
 Fleet Traffic Management
Fleet Traffic Management
 Data Statistics and Analysis
Data Statistics and Analysis

 Data Collection and Update
Data Collection and Update
 Obstacle Detour/Passing/Reporting
Obstacle Detour/Passing/Reporting
 Bumpy Road Detection and Automatic Speed Reduction
Bumpy Road Detection and Automatic Speed Reduction
 Anti-rutting Balanced Crushing
Anti-rutting Balanced Crushing
 Precise Detection of Non-Standard Retaining Walls and Adaptive Parking
Precise Detection of Non-Standard Retaining Walls and Adaptive Parking

 Real-Time Communication
Real-Time Communication
 Path Planning
Path Planning
 Collaborative Operation
Collaborative Operation
 Fault Reporting
Fault Reporting


 Vehicle Monitoring
Vehicle Monitoring
 Emergency Takeover
Emergency Takeover
 Remote Operation
Remote Operation
 Fleet Controlling
Fleet Controlling
 Multi-Level Security Policy
Multi-Level Security Policy
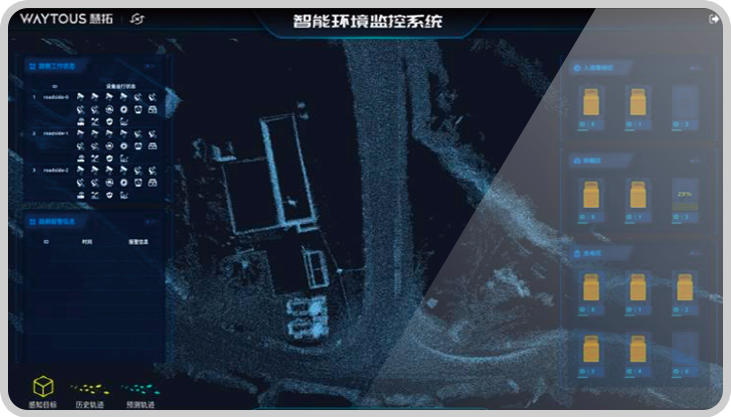

 Vehicle-Road Collaboration Perception
Vehicle-Road Collaboration Perception
 Path Planning and Decision Making
Path Planning and Decision Making
 Traffic Control and Scheduling
Traffic Control and Scheduling
 Information Service
Information Service
 Road Warning
Road Warning


 Verification of Autonomous Driving Algorithms
Verification of Autonomous Driving Algorithms
 Verification of Cloud Scheduling and Management Functions
Verification of Cloud Scheduling and Management Functions
 Verification of Deep Virtual-Real Hybrid in Extreme Scenarios
Verification of Deep Virtual-Real Hybrid in Extreme Scenarios
 Testing on Stability of Software and Hardware
Testing on Stability of Software and Hardware
 Upgrade Autonomous Driving Algorithms Training
Upgrade Autonomous Driving Algorithms Training
 Official WeChat Account
Official WeChat Account