云端智能调度与管理系统 矿车无人驾驶系统 协同作业管理系统 远程驾驶系统 V2X智能路侧协同系统 无人运输平行仿真系统
露天矿全栈式解决方案 井工矿全栈式解决方案 园区物流全栈式解决方案
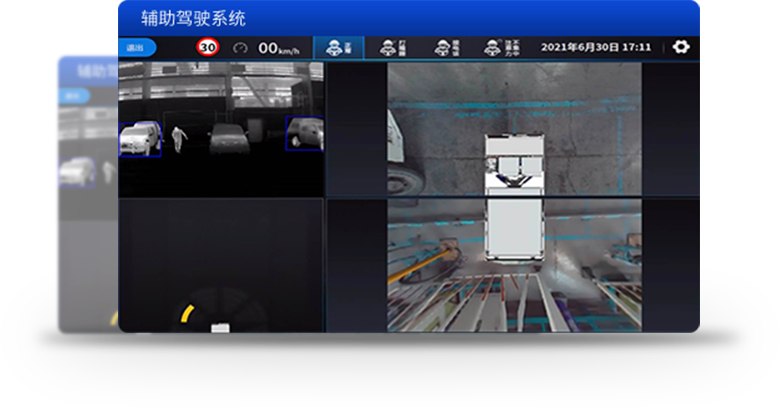
远程驾驶系统 域控制器 V2X终端 V2X智能路侧协同系统 防碰撞系统 无轨胶轮车L1安全辅助驾驶系统 矿山智能运载机器人 愚公矿山大模型
煤炭能源 冶金行业 有色金属 水泥行业 园区物流
关于我们 加入我们
公司动态 媒体报道






 微信公众号
微信公众号
 京公网安备 11010802033712号
京公网安备 11010802033712号