


 高智慧矿山操作系统
高智慧矿山操作系统
适配全机型、多矿种、全场景
 高质量标准交付流程
高质量标准交付流程
软件硬件化、服务产品化、产品系列化、系统平台化
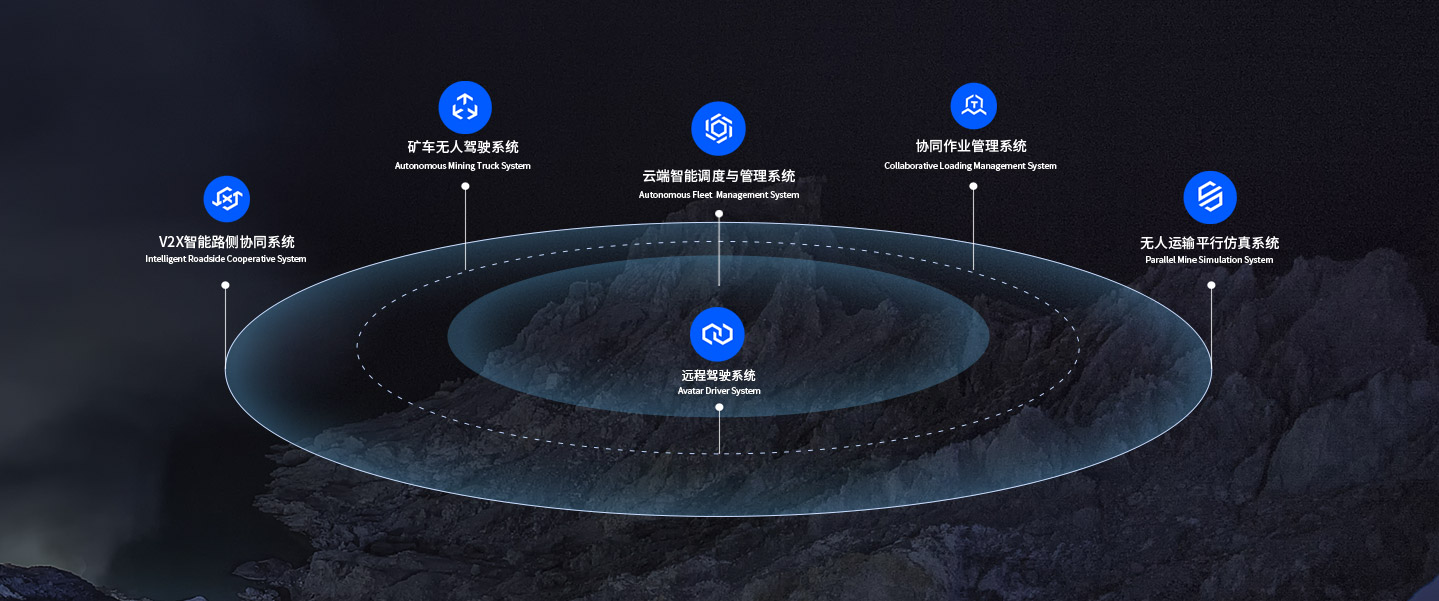
 高性能无人矿山系统
高性能无人矿山系统
安全、效率、无人、混编、节能


Autonomous Fleet Management System
 高精度地图
高精度地图
 全局路径规划
全局路径规划
 智能化调度
智能化调度
 对接有人卡调
对接有人卡调
 车队交通管理
车队交通管理
 数据统计与分析
数据统计与分析

 地图自动采集与更新
地图自动采集与更新
 障碍物绕行/骑行/上报
障碍物绕行/骑行/上报
 颠簸道路检测与自动降速
颠簸道路检测与自动降速
 防车辙均衡碾压
防车辙均衡碾压
 非标准挡墙精准检测与自适应停靠
非标准挡墙精准检测与自适应停靠

 实时通信
实时通信
 路径规划
路径规划
 协同作业
协同作业
 故障上报
故障上报


Avatar Driver System
 车辆监控
车辆监控
 应急接管
应急接管
 远程作业
远程作业
 一控多车
一控多车
 多级安全策略
多级安全策略

Intelligent Roadside Cooperative System
 车路协同感知
车路协同感知
 信息服务
信息服务
 道路预警
道路预警
 路径规划与决策
路径规划与决策
 交通管控与调度
交通管控与调度


Parallel Mine Simulation System
 自动驾驶算法功能验证
自动驾驶算法功能验证
 云端调度与管理功能验证
云端调度与管理功能验证
 深度虚实混合极端场景验证
深度虚实混合极端场景验证
 无人系统软硬件稳定性测试
无人系统软硬件稳定性测试
 自动驾驶算法训练升级
自动驾驶算法训练升级
 微信公众号
微信公众号
 京公网安备 11010802033712号
京公网安备 11010802033712号