

 环境感知
环境感知
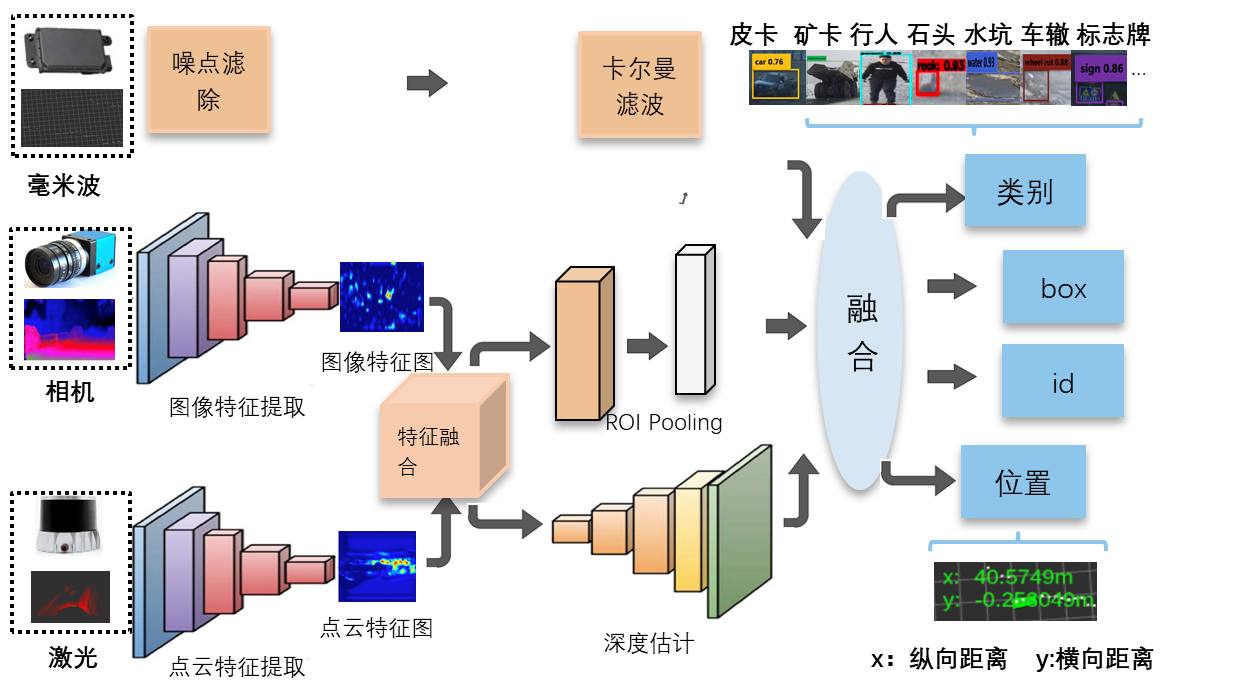
通过激光雷达、毫米波、相机多传感器深度融合网络技术,感知系统可确保在矿区粉尘、雨雪雾、剧烈震动和极端低温等恶劣工况的使用需求,实现车辆颠簸行驶过程中的高鲁棒性多目标的检测和跟踪
 决策规划
决策规划
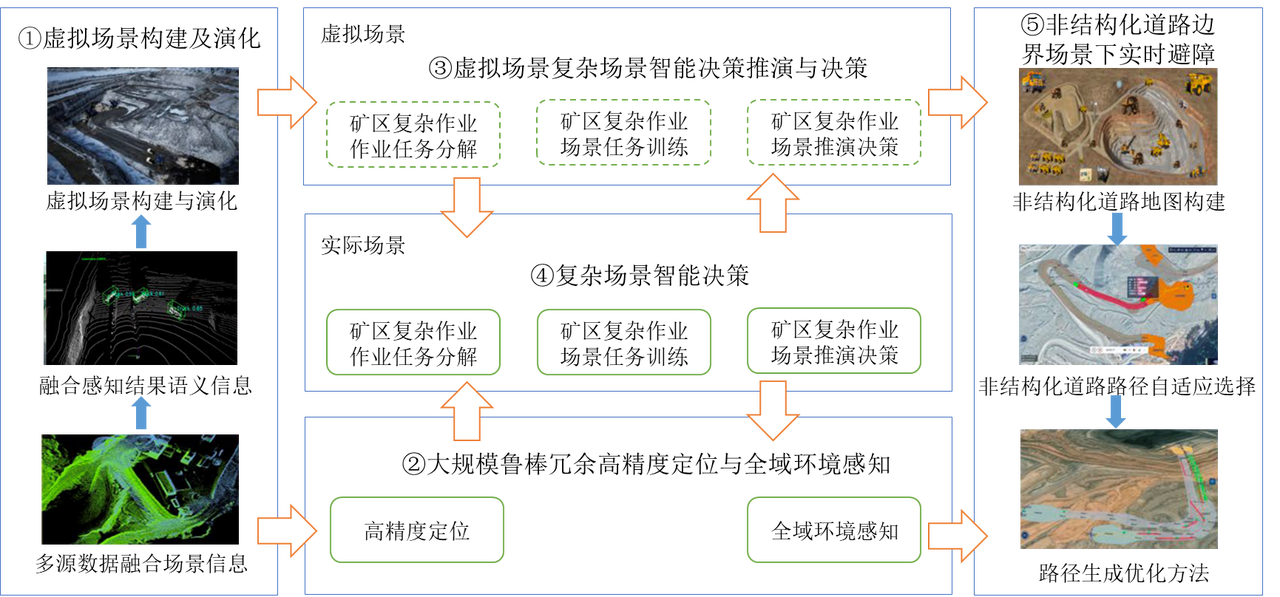
无人驾驶卡车具备复杂场景智能决策与自主路径规划能力,引导车辆安全完全作业任务,可适用于实际生产中的各种极端装载、卸载道路条件,确保在生产过程中的高效和安全
 安全检测
安全检测
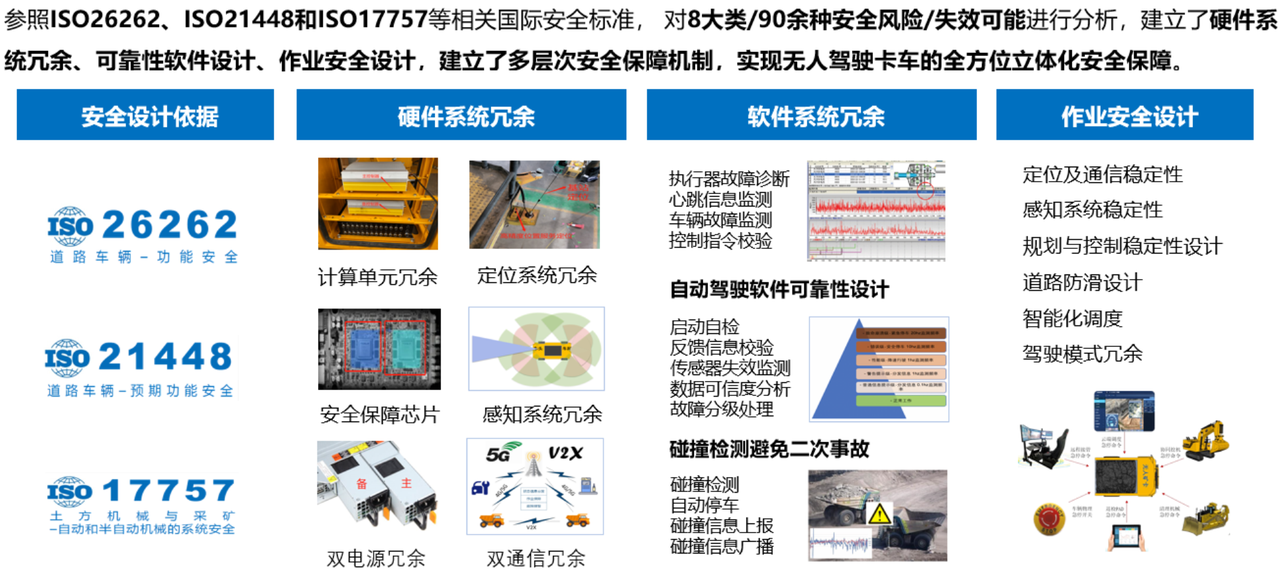
参照ISO26262、ISO21448和ISO17757等相关国际安全标准,建立了硬件系统冗余、可靠性软件设计、作业安全设计,建立了多层次安全保障机制,实现无人驾驶卡车的全方位立体化安全保障
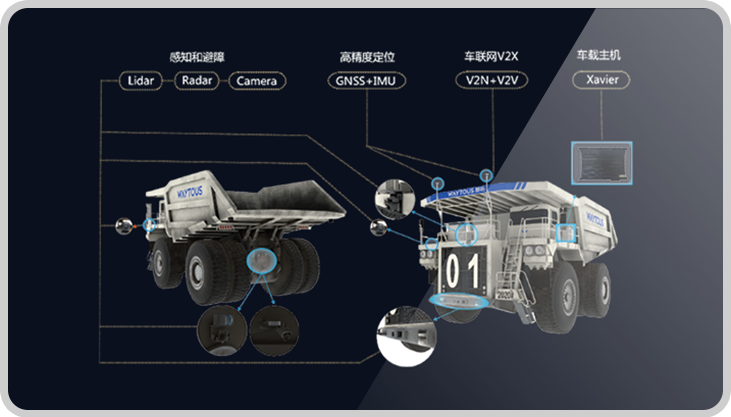
 组合定位
组合定位
多传感器融合定位方案,可同时实现GNSS信号较强和信号较弱环境下的定位和定姿态功能,解决矿区 GNSS系统信号的不稳定性(响应度低、易被遮挡、深坑长时间信号丢失等情况)的问题
 矿卡控制
矿卡控制
独创的无人驾驶矿卡轨迹跟踪控制算法解决了不同矿卡自身响应差异对控制精度的影响,达到业内最高的运行速度和最小轨迹跟踪误差,具备全方位节能控制和安全防滑控制能力
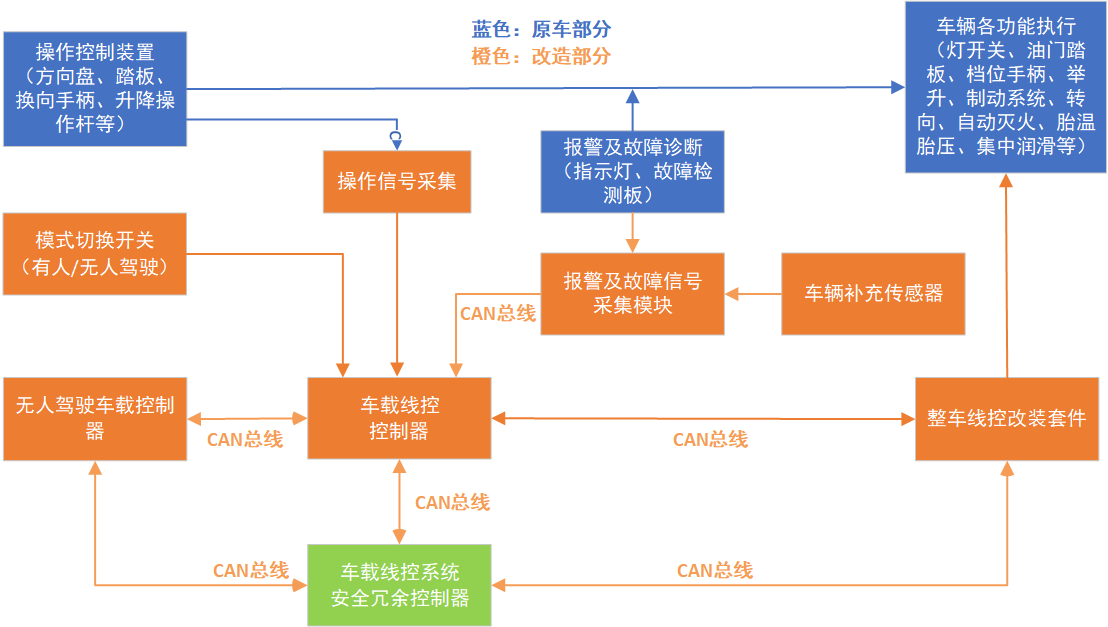 线控系统
线控系统
线控化改造经验涵盖了电动轮矿卡、机械轮矿卡、铰卡、电动轮宽体车、机械轮宽体车等,涉及到的卡车品牌包括徐工、北重、航天、小松、Volvo、 Terex、三一、宇通、临工、潍柴、同力等,共计超过16个车型,能够确保各类型卡车无人驾驶改造的需求

地图自动采集与更新

防车辙道路均衡碾压

非标准挡墙精准停靠

颠簸道路检测与降速

转向自适应精准控制

系统可靠性与安全性
 微信公众号
微信公众号
 京公网安备 11010802033712号
京公网安备 11010802033712号